Note
This page was generated from a Jupyter notebook.
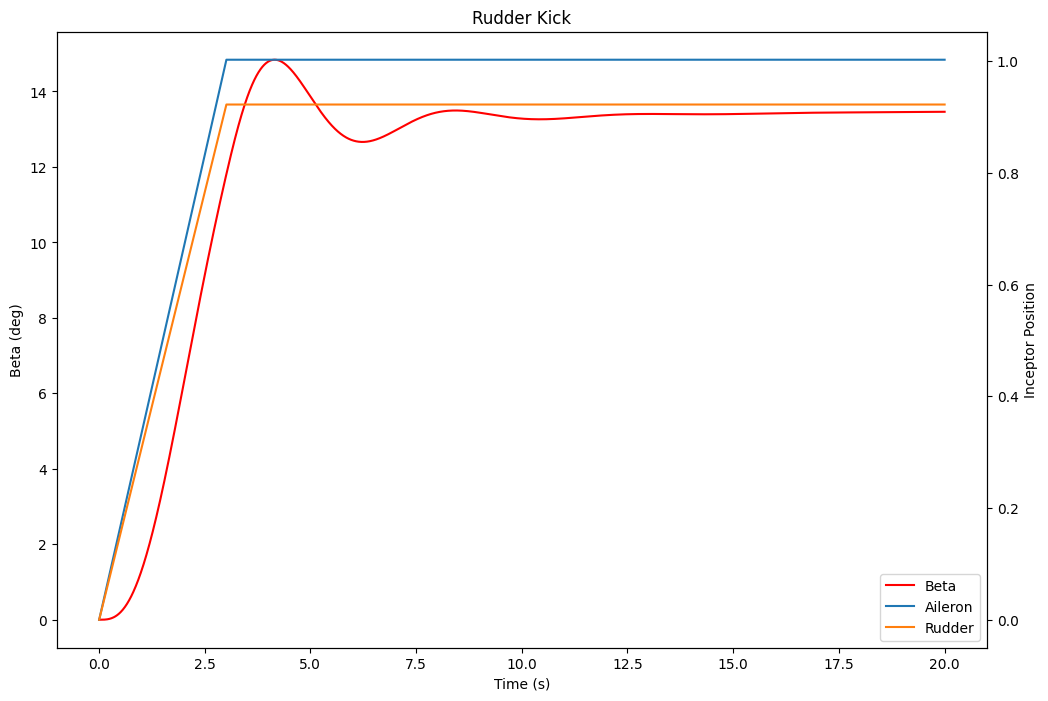
Rudder Kick
Simulate a pilot performing a rudder kick test by inputing a rudder input based on a ramp input. Aileron input is also included to maintain a steady heading sideslip (SHSS). The time histories of the control inputs and beta (sideslip angle) are plotted.
[1]:
import jsbsim
import matplotlib.pyplot as plt
import math
# --- Configuration Section ---
# Global variables that must be modified to match your particular need
# The aircraft name
# Note - It should match the exact spelling of the model file
AIRCRAFT_NAME="737"
# --- JSBSim Initialization ---
# These lines initialize the flight dynamics model.
# Avoid flooding the console with log messages
jsbsim.FGJSBBase().debug_lvl = 0
# Create a flight dynamics model (FDM) instance.
fdm = jsbsim.FGFDMExec(None)
# Load the aircraft model
fdm.load_model(AIRCRAFT_NAME)
# Set engines running
fdm['propulsion/set-running'] = -1
# --- Simulation Parameters ---
# These lines set the simulation parameters.
# Set alpha range for trim solutions
fdm['aero/alpha-max-rad'] = math.radians(12) # Maximum angle of attack in radians.
fdm['aero/alpha-min-rad'] = math.radians(-4.0) # Minimum angle of attack in radians.
# Get the simulation time step (delta time).
dt = fdm.get_delta_t()
# Max control deflection
aileronMax = 1 # Maximum normarized aileron command (-1~1)
rudderMax = 0.92 # Maximum normarized rudder command (-1~1)
# Number of seconds for control surface to reach max deflection
risetime = 3
# Calculate the increment (change) in control surface deflection command per time step.
diAileron = aileronMax / (risetime/dt)
diRudder = rudderMax / (risetime/dt)
# --- Data Storage ---
# This section initializes lists to record simulation data.
times = [] # List to record the simulation time at each step.
betas = [] # List to record the beta angle at each step.
bankAngle = [] # List to record the bank angle at each step.
ailerons = [] # List to record the aileron control surface deflection.
rudder = [] # List to record the rudder control surface deflection.
# --- Simulation Initialization ---
# This line initializes the flight dynamics model.
# Initial conditions
fdm['ic/h-sl-ft'] = 1000 #altitude above sea level (ft)
fdm['ic/vc-kts'] = 200 #calibrated airspeed (kts)
fdm['ic/gamma-deg'] = 0 #flight path angle (deg)
fdm['ic/beta-deg'] = 0 #sideslip angle (deg)
# Initialize the aircraft with initial conditions
fdm.run_ic()
# Attempt to trim the aircraft.
try:
# 1 means straight flight by using all changeable control variables.
fdm['simulation/do_simple_trim'] = 1
except jsbsim.TrimFailureError:
print("Trim failed, continuing rudder kick in an untrimmed state.")
pass # Ignore trim failure
# --- Simulation Loop ---
# This is the main simulation loop that runs the simulation for a specified duration.
# Time to run for in seconds.
run_period = 20
for i in range(int(run_period/dt)):
# Advance the simulation by one time step.
fdm.run()
# Record the simulation data.
times.append(fdm.get_sim_time())
betas.append(fdm['aero/beta-deg'])
bankAngle.append(fdm['attitude/phi-deg'])
ailerons.append(fdm['fcs/aileron-cmd-norm'])
rudder.append(fdm['fcs/rudder-cmd-norm'])
# Control Surface Update
aileronCmd = fdm['fcs/aileron-cmd-norm']
rudderCmd = fdm['fcs/rudder-cmd-norm']
# Increment the aileron command if it's less than the maximum.
if aileronCmd < aileronMax:
aileronCmd += diAileron
fdm['fcs/aileron-cmd-norm'] = aileronCmd
# Increment the rudder command if it's less than the maximum.
if rudderCmd < rudderMax:
rudderCmd += diRudder
fdm['fcs/rudder-cmd-norm'] = rudderCmd
# --- Plot Results ---
# This section plots the simulation results.
plt.rcParams["figure.figsize"] = (12, 8) # Set the figure size.
fig, ax1 = plt.subplots()
# Plot the beta data on the primary y-axis.
ax1.set_xlabel('Time (s)')
ax1.set_ylabel('Beta (deg)')
line1 = ax1.plot(times, betas, label='Beta', color='red')
# Create a secondary y-axis for the control surface positions.
ax2 = ax1.twinx()
# Plot the aileron and rudder commands on the secondary y-axis.
ax2.set_ylabel('Inceptor Position')
line2 = ax2.plot(times, ailerons, label='Aileron')
line3 = ax2.plot(times, rudder, label='Rudder')
# Add a legend to the plot.
ax1.legend(handles=line1+line2+line3, loc=4)
# Set the title of the plot.
plt.title('Rudder Kick')
# Display the plot.
plt.show()