Note
This page was generated from a Jupyter notebook.
JSBSim Trim and Elevator Doublet with PathSim
This notebook demonstrates how to embed a JSBSim flight dynamics model (FDM) directly inside a PathSim block diagram using a DynamicalFunction block — without any additional wrapper library.
The example is adapted from test_pathsim_01_Trim_Elevator_Doublet.ipynb and covers:
Instantiating and trimming a JSBSim FDM (Global 5000 business jet).
Wrapping the FDM step inside a PathSim
DynamicalFunctionblock.Assembling a block diagram that applies a doublet elevator input and records the angle-of-attack response.
Plotting the results.
Prerequisites: jsbsim and pathsim must be installed.
pip install jsbsim
pip install pathsim
pathsim-flight integration.1. Imports
[1]:
import os
import xml.etree.ElementTree as ET
import numpy as np
import matplotlib
import matplotlib.pyplot as plt
import jsbsim
import pathsim
matplotlib.rcParams.update({'figure.dpi': 120, 'axes.grid': True, 'grid.alpha': 0.4})
# Suppress JSBSim console output
# jsbsim.FGJSBBase().debug_lvl = 0
print(f"JSBSim version : {jsbsim.__version__}")
print(f"PathSim version : {pathsim.__version__}")
JSBSim version : 1.3.1.dev1
PathSim version : 0.20.0
2. Initialize the JSBSim FDM
Instantiate an FGFDMExec object and load the Global 5000 business-jet model (global5000) from the JSBSim Python-package data directory.
[2]:
AIRCRAFT_NAME = "global5000"
# Use the aircraft data bundled with the jsbsim Python package
fdm = jsbsim.FGFDMExec(jsbsim.get_default_root_dir())
fdm.set_debug_level(0) # Suppress verbose JSBSim console output
load_status = fdm.load_model(AIRCRAFT_NAME)
# Property manager gives direct node access (used later to read alpha)
pm = fdm.get_property_manager()
print(f"Aircraft loaded : {AIRCRAFT_NAME}")
print(f"JSBSim root dir : {fdm.get_root_dir()}")
print(f"Load status : {load_status}")
JSBSim Flight Dynamics Model v1.3.1.dev1 Apr 16 2026 08:58:01
[JSBSim-ML v2.0]
JSBSim startup beginning ...
In file /home/vscode/.local/lib/python3.11/site-packages/jsbsim/aircraft/global5000/global5000.xml: line 917
No property by the name aero/coefficient/CLalpha has been defined. This property will not be logged. You should check your configuration file.
Aircraft loaded : global5000
JSBSim root dir : /home/vscode/.local/lib/python3.11/site-packages/jsbsim
Load status : True
3. Aircraft Parameters and Trim Conditions
Parse the aircraft XML to extract the empty weight and centre-of-gravity location, then define payload, fuel, and initial flight conditions for the trim.
[3]:
# Parse aircraft XML to get empty weight and CG
ac_xml_path = os.path.join(
fdm.get_root_dir(), f"aircraft/{AIRCRAFT_NAME}/{AIRCRAFT_NAME}.xml"
)
ac_xml_root = ET.parse(ac_xml_path).getroot()
# Empty weight [lbs]
empty_weight = float(
ac_xml_root.find("mass_balance/emptywt").text
)
# Original CG x-location [inches from construction-axes origin]
x_cg_0 = float(
ac_xml_root.find("mass_balance/location/x").text
)
# --- Payload and fuel ---
payload_0 = 15172 / 2 # half payload [lb]
fuelmax = 8097.63 # Global 5000 max fuel [lb]
fuel_per_tank = fuelmax / 2 # each of the three tanks loaded to half its capacity
# --- Initial flight conditions ---
speed_cas = 250.0 # calibrated airspeed [kts]
h_ft_0 = 15000.0 # altitude [ft]
gamma_0 = 0.0 # flight-path angle [deg]
weight_0 = empty_weight + payload_0 + fuel_per_tank * 3
print(f"Empty weight : {empty_weight:.0f} lb")
print(f"Total weight (est.) : {weight_0:.0f} lb")
print(f"CG x (original) : {x_cg_0:.2f} in")
print(f"Trim altitude : {h_ft_0:.0f} ft")
print(f"Trim CAS : {speed_cas:.0f} kts")
Empty weight : 48235 lb
Total weight (est.) : 67967 lb
CG x (original) : 790.82 in
Trim altitude : 15000 ft
Trim CAS : 250 kts
4. Level-Flight Trim
Apply the initial conditions, start the engines, and ask JSBSim’s built-in trimmer (simulation/do_simple_trim) to find the steady level-flight equilibrium. The resulting elevator position and throttle are saved as the trim reference.
[4]:
# Set engines running
fdm['propulsion/set-running'] = -1
# Initial conditions
fdm['ic/h-sl-ft'] = h_ft_0
fdm['ic/vc-kts'] = speed_cas
fdm['ic/gamma-deg'] = gamma_0
# Fuel load (three tanks)
fdm['propulsion/tank[0]/contents-lbs'] = fuel_per_tank
fdm['propulsion/tank[1]/contents-lbs'] = fuel_per_tank
fdm['propulsion/tank[2]/contents-lbs'] = fuel_per_tank
# Payload pointmass
fdm['inertia/pointmass-weight-lbs[0]'] = payload_0
# Initialise and trim
fdm.run_ic()
fdm.run()
fdm['simulation/do_simple_trim'] = 1
fdm.run()
# Trim results
trim_vc_kts = fdm['velocities/vc-kts']
trim_alpha_deg = fdm['aero/alpha-deg']
trim_elev_rad = fdm['fcs/elevator-pos-rad']
trim_elev_deg = fdm['fcs/elevator-pos-deg']
trim_elev_norm = fdm['fcs/elevator-pos-norm']
throttle_cmd_0 = fdm['fcs/throttle-cmd-norm']
print("Trim results:")
print(f" CAS : {trim_vc_kts:.2f} kts")
print(f" Angle of attack : {trim_alpha_deg:.4f} deg")
print(f"=========")
print(f" Elevator (rad) : {trim_elev_rad:.6f} rad")
print(f" Elevator (deg) : {trim_elev_deg:.4f} deg")
print(f" Elevator (norm) : {trim_elev_norm:.6f}")
print(f"=========")
print(f" Elevator Autopilot Cmd (norm) : {fdm['ap/elevator_cmd']:.6f}")
print(f" Elevator Trim Tab Cmd (norm) : {fdm['fcs/elevator-cmd-norm']:.6f}")
print(f"=========")
print(f" Throttle cmd norm : {throttle_cmd_0:.6f}")
Trim results:
CAS : 250.00 kts
Angle of attack : 4.3176 deg
=========
Elevator (rad) : -0.051721 rad
Elevator (deg) : -2.9634 deg
Elevator (norm) : -0.147775
=========
Elevator Autopilot Cmd (norm) : -0.000000
Elevator Trim Tab Cmd (norm) : 0.000000
=========
Throttle cmd norm : 0.772610
5. PathSim Block Diagram
The flight-dynamics model is embedded as a PathSim DynamicalFunction block whose input is the normalised elevator command and whose output is the angle of attack in degrees.
The total elevator command is the sum of two sources:
Block |
Role |
|---|---|
|
Constant source — elevator position at trim |
|
|
|
|
|
|
|
|
|
|
The doublet shape: see code below
[5]:
from pathsim import Simulation, Connection
from pathsim.blocks import DynamicalFunction, Source, StepSource, Adder, Scope
# -----------------------------------------------------------------------
# Aircraft block: receives elevator command, advances JSBSim by one step,
# and returns the angle of attack.
# -----------------------------------------------------------------------
def f_aircraft(u, t):
# Hold throttle at trim power to isolate the elevator response
fdm['fcs/throttle-cmd-norm'] = throttle_cmd_0
# PathSim passes u as a 1-D array; recent numpy rejects float() on non-0-d arrays,
# so .flat[0] reliably extracts the scalar regardless of array shape.
fdm['fcs/elevator-cmd-norm'] = float(np.asarray(u).flat[0])
fdm.run()
return pm.get_node('aero/alpha-deg').get_double_value()
dynFunAircraft = DynamicalFunction(f_aircraft)
# -----------------------------------------------------------------------
# Signal sources
# -----------------------------------------------------------------------
# Constant: normalised elevator position at trim
def f_elevator_command_at_trim(t):
return 0 # already set to: trim_elev_norm ... Why?
srcElevatorAtTrim = Source(f_elevator_command_at_trim)
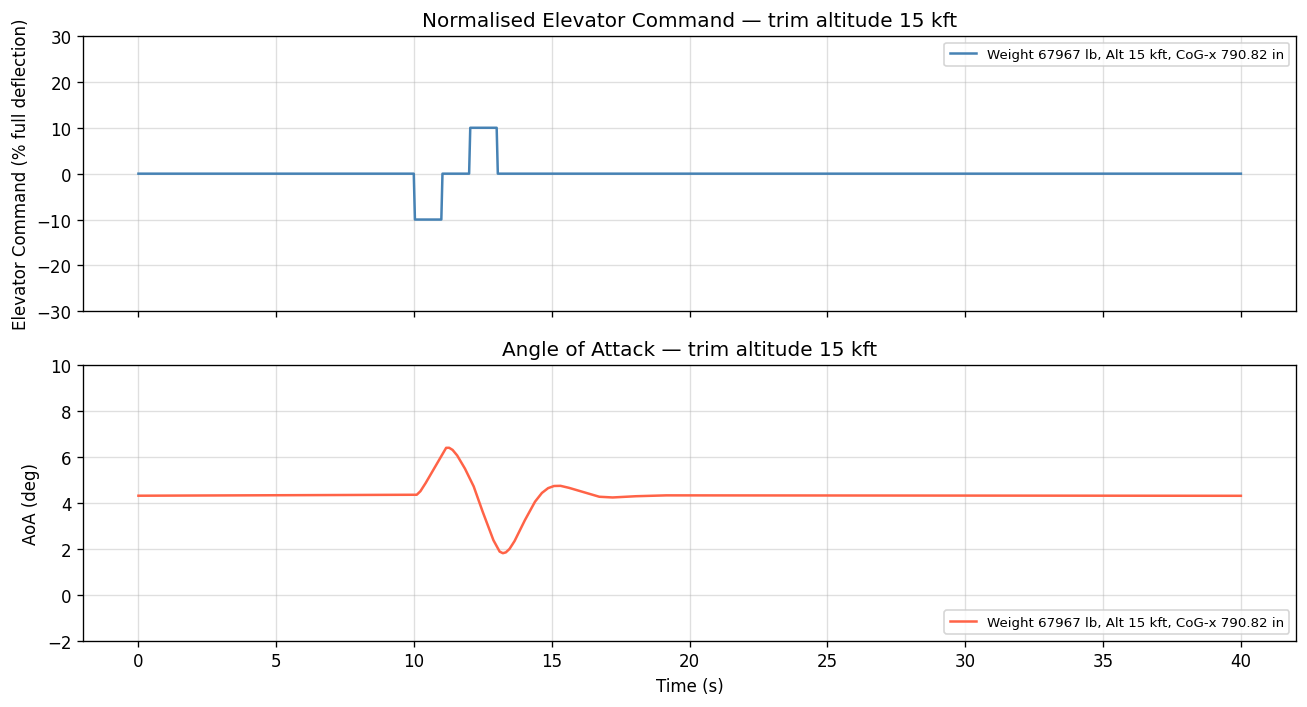
# Doublet: −0.10 at t=10 s, 0 at t=11 s, +0.10 at t=12 s, 0 at t=13 s
srcStepElevator = StepSource(
amplitude=[-0.1, 0, 0.1, 0],
tau=[10, 11, 12, 13]
)
# -----------------------------------------------------------------------
# Signal processing blocks
# -----------------------------------------------------------------------
# Sum trim command and doublet perturbation
addedElevatorSignals = Adder('++')
# Scale elevator command × 100 so both traces fit on a similar y-scale
def f_gain_100x(u, t):
return 100.0 * u
ampElevatorNormalized = DynamicalFunction(f_gain_100x)
# Scope records two channels: scaled elevator command and alpha
sco = Scope(labels=["Elevator Command (% of full deflection)", "Angle of Attack (deg)"])
# -----------------------------------------------------------------------
# Assemble the block diagram
# -----------------------------------------------------------------------
blocks = [
srcElevatorAtTrim,
srcStepElevator,
addedElevatorSignals,
dynFunAircraft,
ampElevatorNormalized,
sco,
]
connections = [
Connection(srcElevatorAtTrim, addedElevatorSignals[0]),
Connection(srcStepElevator, addedElevatorSignals[1]),
Connection(addedElevatorSignals, dynFunAircraft),
Connection(addedElevatorSignals, ampElevatorNormalized),
Connection(ampElevatorNormalized, sco[0]),
Connection(dynFunAircraft, sco[1]),
]
# -----------------------------------------------------------------------
# Run the simulation for 40 s with a JSBSim standard dt (60 Hz)
# -----------------------------------------------------------------------
sim = Simulation(blocks, connections,
dt=fdm.get_delta_t(),
log=True)
print("Running 40-second simulation …")
sim.run(40.0)
print("Done.")
11:43:16 - INFO - LOGGING (log: True)
11:43:16 - INFO - BLOCKS (total: 6, dynamic: 0, static: 6, eventful: 1)
11:43:16 - INFO - GRAPH (nodes: 6, edges: 6, alg. depth: 3, loop depth: 0, runtime: 0.105ms)
Running 40-second simulation …
11:43:16 - INFO - STARTING -> TRANSIENT (Duration: 40.00s)
11:43:16 - INFO - -------------------- 1% | 0.0s<1.7s | 2774.5 it/s
11:43:16 - INFO - ####---------------- 20% | 0.3s<0.4s | 9158.3 it/s
11:43:16 - INFO - ########------------ 40% | 0.5s<0.6s | 4870.0 it/s
11:43:16 - INFO - ############-------- 60% | 0.7s<0.2s | 11820.1 it/s
11:43:17 - INFO - ################---- 80% | 0.8s<0.1s | 6939.4 it/s
11:43:17 - INFO - #################### 100% | 1.0s<--:-- | 7093.7 it/s
11:43:17 - INFO - FINISHED -> TRANSIENT (total steps: 4801, successful: 4801, runtime: 983.50 ms)
Done.
6. Simulation Results
The upper panel shows the normalised elevator command (scaled to percent of full deflection) and the lower panel shows the resulting angle-of-attack response.
[6]:
%matplotlib inline
t_rec = sco.recording_time
data = np.array(sco.recording_data[:])
label = (
f"Weight {weight_0:.0f} lb, "
f"Alt {h_ft_0/1000:.0f} kft, "
f"CoG-x {x_cg_0:.2f} in"
)
fig, (ax1, ax2) = plt.subplots(2, 1, figsize=(11, 6), sharex=True)
ax1.plot(t_rec, data[:, 0], color='steelblue', linewidth=1.5, label=label)
ax1.set_title(
f"Normalised Elevator Command — trim altitude {h_ft_0/1000:.0f} kft"
)
ax1.set_ylabel('Elevator Command (% full deflection)')
ax1.set_ylim(-30, 30)
ax1.legend(loc='upper right', fontsize=8)
ax2.plot(t_rec, data[:, 1], color='tomato', linewidth=1.5, label=label)
ax2.set_title(
f"Angle of Attack — trim altitude {h_ft_0/1000:.0f} kft"
)
ax2.set_xlabel('Time (s)')
ax2.set_ylabel('AoA (deg)')
ax2.set_ylim(-2, 10)
ax2.legend(loc='lower right', fontsize=8)
plt.tight_layout()
plt.show()