Note
This page was generated from a Jupyter notebook.
JSBSim Flight Simulation
This notebook demonstrates a trimmed flight simulation with the Cessna 172P using the JSBSim Python API. We record a set of key flight parameters over a 60-second time window and visualise them as time-history plots.
Topics covered
Running a longer simulation loop with data collection.
Working with JSBSim’s property tree (positions, velocities, attitudes, forces).
Unit conversions (feet → metres, knots → m/s, radians → degrees).
Producing publication-quality plots with
matplotlib.
1. Setup
[1]:
import math
import numpy as np
import matplotlib
import matplotlib.pyplot as plt
import jsbsim
matplotlib.rcParams.update({
'figure.dpi': 120,
'axes.grid': True,
'grid.alpha': 0.4,
})
print(f"JSBSim version : {jsbsim.__version__}")
print(f"NumPy version : {np.__version__}")
print(f"Matplotlib ver : {matplotlib.__version__}")
JSBSim version : 1.3.1.dev1
NumPy version : 2.4.4
Matplotlib ver : 3.10.8
2. Initialise JSBSim and trim
[2]:
# ---------- configuration ----------
AIRCRAFT = 'c172p'
ALT_FT = 5000.0 # Initial altitude [ft MSL]
AIRSPEED_KTS = 90.0 # Calibrated airspeed [kts]
HEADING_DEG = 90.0 # True heading [deg]
SIM_DURATION = 60.0 # Simulation duration [s]
RECORD_HZ = 10 # Data recording frequency [Hz]
# -----------------------------------
fdm = jsbsim.FGFDMExec(None)
fdm.set_debug_level(0)
fdm.load_model(AIRCRAFT)
fdm['ic/h-sl-ft'] = ALT_FT
fdm['ic/vc-kts'] = AIRSPEED_KTS
fdm['ic/gamma-deg'] = 0.0
fdm['ic/psi-true-deg'] = HEADING_DEG
fdm.run_ic()
fdm['propulsion/set-running'] = -1
fdm['simulation/do_simple_trim'] = 1
dt = fdm.get_delta_t()
record_step = max(1, int(1.0 / (RECORD_HZ * dt)))
print(f"Aircraft : {AIRCRAFT}")
print(f"Alt (MSL) : {ALT_FT:.0f} ft")
print(f"Airspeed : {AIRSPEED_KTS:.0f} kts KCAS")
print(f"Time step Δt : {dt:.6f} s ({1/dt:.0f} Hz)")
print(f"Record step : every {record_step} steps ({RECORD_HZ} Hz)")
print(f"Trim AoA : {fdm['aero/alpha-deg']:.2f} deg")
print(f"Trim throttle : {fdm['fcs/throttle-cmd-norm[0]']:.3f}")
JSBSim Flight Dynamics Model v1.3.1.dev1 Apr 16 2026 08:58:01
[JSBSim-ML v2.0]
JSBSim startup beginning ...
Aircraft : c172p
Alt (MSL) : 5000 ft
Airspeed : 90 kts KCAS
Time step Δt : 0.008333 s (120 Hz)
Record step : every 12 steps (10 Hz)
Trim AoA : 1.28 deg
Trim throttle : 0.694
3. Run the simulation and record data
[3]:
# Containers for recorded data
rec = {
't_s': [],
'alt_ft': [],
'alt_m': [],
'vt_fps': [],
'vc_kts': [],
'alpha_deg': [],
'theta_deg': [],
'phi_deg': [],
'psi_deg': [],
'nx': [], # load factor (longitudinal)
'nz': [], # load factor (normal)
'lat_deg': [],
'lon_deg': [],
}
total_steps = int(SIM_DURATION / dt)
step = 0
while step < total_steps:
fdm.run()
step += 1
if step % record_step == 0:
rec['t_s'].append(fdm['simulation/sim-time-sec'])
rec['alt_ft'].append(fdm['position/h-sl-ft'])
rec['alt_m'].append(fdm['position/h-sl-ft'] * 0.3048)
rec['vt_fps'].append(fdm['velocities/vt-fps'])
rec['vc_kts'].append(fdm['velocities/vc-kts'])
rec['alpha_deg'].append(fdm['aero/alpha-deg'])
rec['theta_deg'].append(fdm['attitude/theta-deg'])
rec['phi_deg'].append(fdm['attitude/phi-deg'])
rec['psi_deg'].append(fdm['attitude/psi-deg'])
rec['nx'].append(fdm['accelerations/Nx'])
rec['nz'].append(fdm['accelerations/Nz'])
rec['lat_deg'].append(math.degrees(fdm['position/lat-geod-rad']))
rec['lon_deg'].append(math.degrees(fdm['position/long-gc-rad']))
# Convert to NumPy arrays for convenient indexing
for key in rec:
rec[key] = np.array(rec[key])
print(f"Recorded {len(rec['t_s'])} samples over {SIM_DURATION:.0f} s")
print(f"Final altitude : {rec['alt_ft'][-1]:.1f} ft")
print(f"Final airspeed : {rec['vc_kts'][-1]:.1f} kts KCAS")
Recorded 600 samples over 60 s
Final altitude : 5000.2 ft
Final airspeed : 90.0 kts KCAS
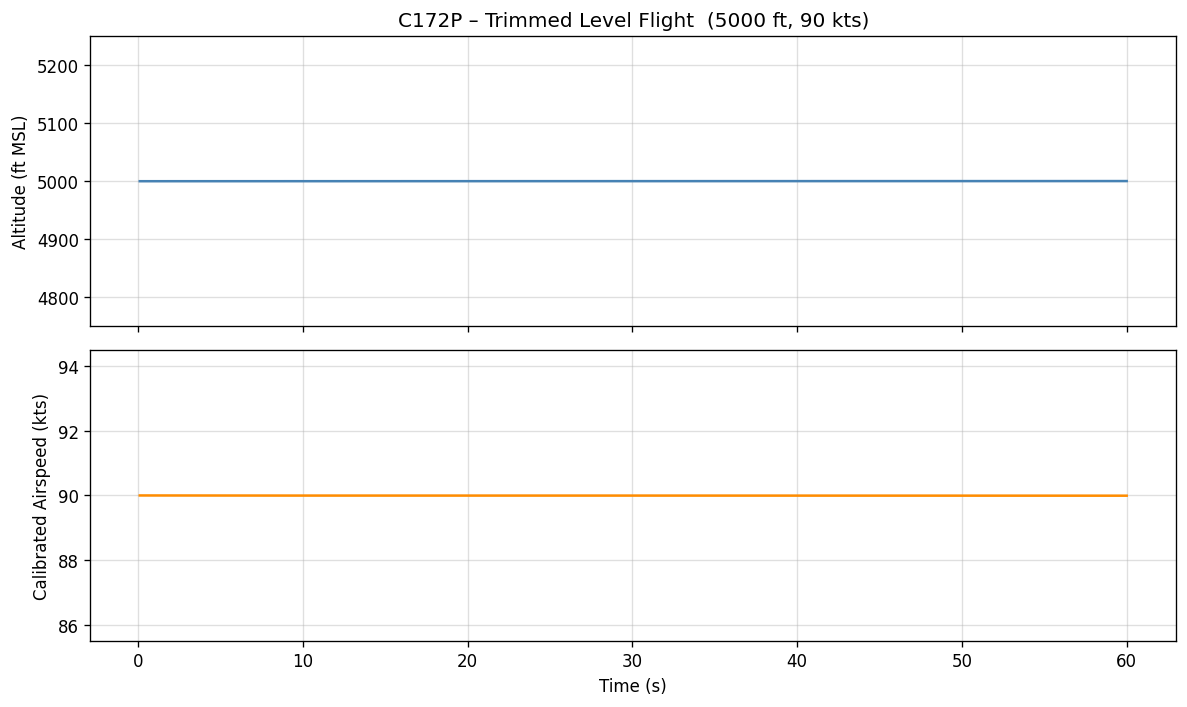
4. Visualise – altitude and airspeed
[4]:
fig, axes = plt.subplots(2, 1, figsize=(10, 6), sharex=True)
axes[0].plot(rec['t_s'], rec['alt_ft'], color='steelblue', linewidth=1.5)
axes[0].set_ylabel('Altitude (ft MSL)')
axes[0].set_title(f'{AIRCRAFT.upper()} – Trimmed Level Flight '
f'({ALT_FT:.0f} ft, {AIRSPEED_KTS:.0f} kts)')
axes[1].plot(rec['t_s'], rec['vc_kts'], color='darkorange', linewidth=1.5)
axes[1].set_ylabel('Calibrated Airspeed (kts)')
axes[1].set_xlabel('Time (s)')
# set y-axis limits to +/-5% of initial values for better visualization
axes[0].set_ylim(ALT_FT * 0.95, ALT_FT * 1.05)
axes[1].set_ylim(AIRSPEED_KTS * 0.95, AIRSPEED_KTS * 1.05)
plt.tight_layout()
plt.savefig('altitude_airspeed.png', bbox_inches='tight')
plt.show()
# print("Figure saved as altitude_airspeed.png")
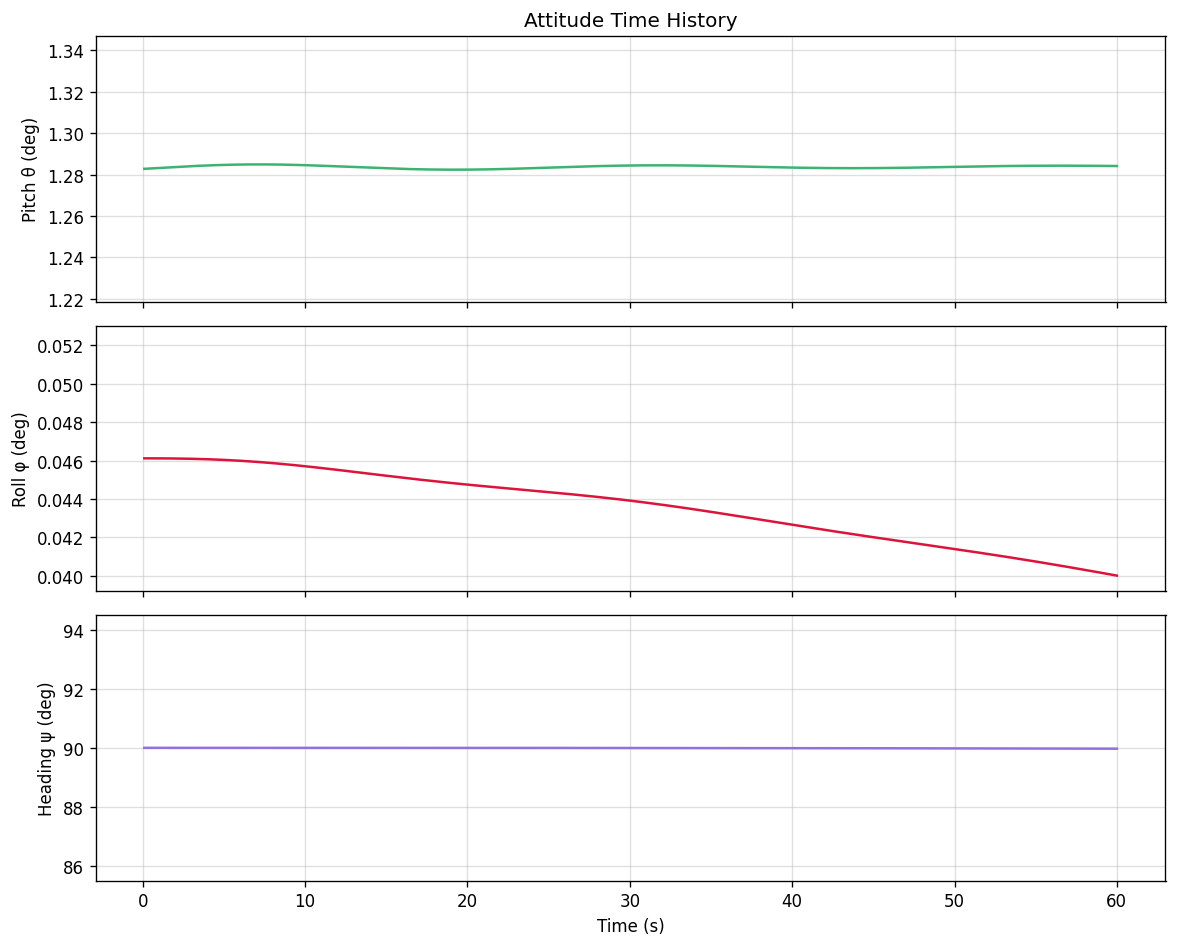
5. Visualise – attitude angles
[5]:
fig, axes = plt.subplots(3, 1, figsize=(10, 8), sharex=True)
axes[0].plot(rec['t_s'], rec['theta_deg'], color='mediumseagreen', linewidth=1.5)
axes[0].set_ylabel('Pitch θ (deg)')
axes[0].set_title('Attitude Time History')
axes[1].plot(rec['t_s'], rec['phi_deg'], color='crimson', linewidth=1.5)
axes[1].set_ylabel('Roll φ (deg)')
axes[2].plot(rec['t_s'], rec['psi_deg'], color='mediumpurple', linewidth=1.5)
axes[2].set_ylabel('Heading ψ (deg)')
axes[2].set_xlabel('Time (s)')
# set y-axis limits to +/-K% of initial values for better visualization
axes[0].set_ylim(rec['theta_deg'][0] * 0.95, rec['theta_deg'][0] * 1.05)
axes[1].set_ylim(rec['phi_deg'][0] * 0.85, rec['phi_deg'][0] * 1.15)
axes[2].set_ylim(rec['psi_deg'][0] * 0.95, rec['psi_deg'][0] * 1.05)
plt.tight_layout()
plt.savefig('attitude.png', bbox_inches='tight')
plt.show()
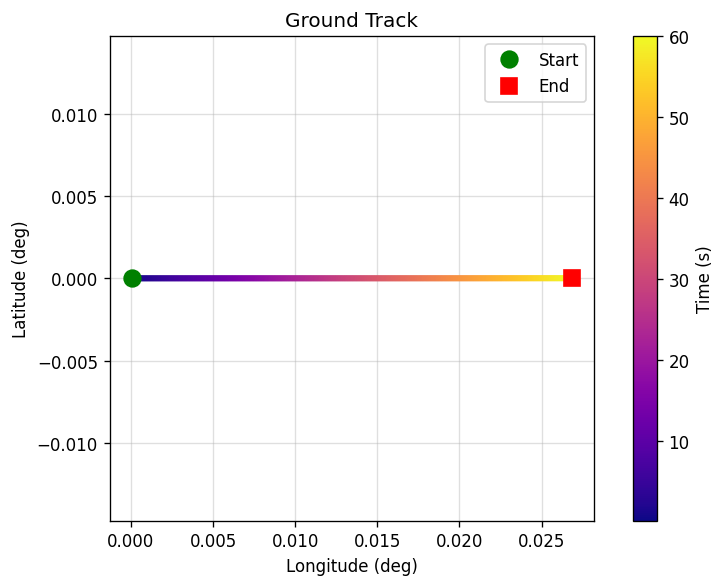
6. Visualise – ground track
[6]:
fig, ax = plt.subplots(figsize=(7, 5))
sc = ax.scatter(
rec['lon_deg'], rec['lat_deg'],
c=rec['t_s'], cmap='plasma', s=6, zorder=3
)
cbar = fig.colorbar(sc, ax=ax, label='Time (s)')
ax.plot(rec['lon_deg'][0], rec['lat_deg'][0],
'go', ms=10, label='Start', zorder=4)
ax.plot(rec['lon_deg'][-1], rec['lat_deg'][-1],
'rs', ms=10, label='End', zorder=4)
ax.set_xlabel('Longitude (deg)')
ax.set_ylabel('Latitude (deg)')
ax.set_title('Ground Track')
ax.legend()
x_min, x_max = ax.get_xlim()
y_min, y_max = ax.get_ylim()
span = max(x_max - x_min, y_max - y_min)
x_center = 0.5 * (x_min + x_max)
y_center = 0.5 * (y_min + y_max)
ax.set_xlim(x_center - 0.5 * span, x_center + 0.5 * span)
ax.set_ylim(y_center - 0.5 * span, y_center + 0.5 * span)
ax.set_aspect('equal', adjustable='box')
plt.tight_layout()
plt.savefig('ground_track.png', bbox_inches='tight')
plt.show()
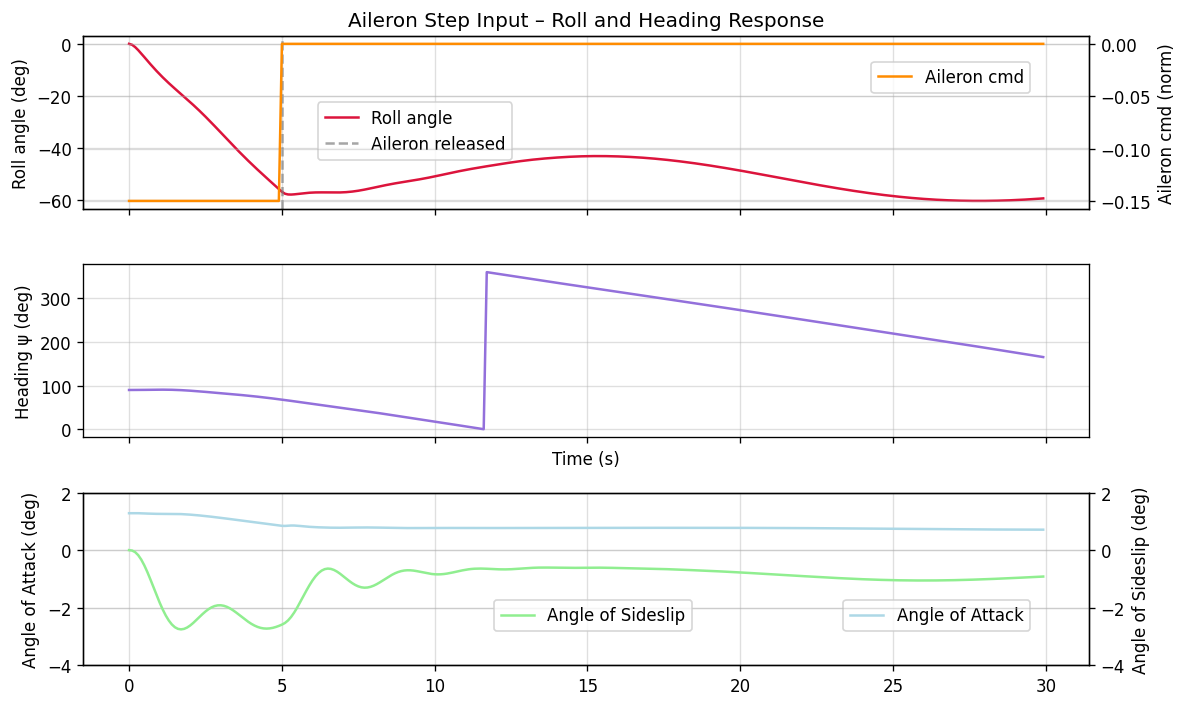
7. Reset and re-run: 10-degree turn to the left
JSBSim can be reset and re-trimmed to explore different manoeuvres. Here we apply a step aileron input to initiate a gentle left turn.
[7]:
# Reset
fdm.reset_to_initial_conditions(0)
fdm['propulsion/set-running'] = -1
fdm['simulation/do_simple_trim'] = 1
turn_rec = {'t_s': [], 'phi_deg': [], 'psi_deg': [], 'alt_ft': [], 'alpha_deg': [], 'beta_deg': []}
total_steps = int(30.0 / dt)
for step in range(total_steps):
# Apply a gentle left aileron deflection for the first 5 s
if fdm['simulation/sim-time-sec'] < 5.0:
fdm['fcs/aileron-cmd-norm'] = -0.15
else:
fdm['fcs/aileron-cmd-norm'] = 0.0
fdm.run()
if step % record_step == 0:
turn_rec['t_s'].append(fdm['simulation/sim-time-sec'])
turn_rec['phi_deg'].append(fdm['attitude/phi-deg'])
turn_rec['psi_deg'].append(fdm['attitude/psi-deg'])
turn_rec['alt_ft'].append(fdm['position/h-sl-ft'])
turn_rec['alpha_deg'].append(fdm['aero/alpha-rad'] * 180 / np.pi)
turn_rec['beta_deg'].append(fdm['aero/beta-rad'] * 180 / np.pi)
for key in turn_rec:
turn_rec[key] = np.array(turn_rec[key])
fig, axes = plt.subplots(3, 1, figsize=(10, 6), sharex=True)
axes[0].plot(turn_rec['t_s'], turn_rec['phi_deg'], color='crimson', linewidth=1.5, label='Roll angle')
axes[0].set_ylabel('Roll φ (deg)')
axes[0].set_title('Aileron Step Input – Roll and Heading Response')
axes[0].axvline(5.0, linestyle='--', color='grey', alpha=0.7, label='Aileron released')
axes[0].legend(loc='center',bbox_to_anchor=(0.33, 0.45))
axes[0].set_ylabel('Roll angle (deg)')
# plot also aileron command for reference
ax2 = axes[0].twinx()
ax2.plot(turn_rec['t_s'], np.where(turn_rec['t_s'] < 5.0, -0.15, 0.0), color='darkorange', linewidth=1.5, label='Aileron cmd')
ax2.set_ylabel('Aileron cmd (norm)')
ax2.legend(loc='upper right', bbox_to_anchor=(0.95, 0.90))
axes[1].plot(turn_rec['t_s'], turn_rec['psi_deg'], color='mediumpurple', linewidth=1.5)
axes[1].set_ylabel('Heading ψ (deg)')
axes[1].set_xlabel('Time (s)')
# plot also Angle of Attack and Angle of Sideslip for reference
axes[2].plot(turn_rec['t_s'], turn_rec['alpha_deg'], color='lightblue', linewidth=1.5, label='Angle of Attack')
axes[2].set_ylabel('Angle of Attack (deg)')
axes[2].legend(loc='lower right', bbox_to_anchor=(0.95, 0.15))
axes[2].set_ylim(-4, 2)
# plot also Angle of Sideslip for reference
ax4 = axes[2].twinx()
ax4.plot(turn_rec['t_s'], turn_rec['beta_deg'], color='lightgreen', linewidth=1.5, label='Angle of Sideslip')
ax4.set_ylabel('Angle of Sideslip (deg)')
ax4.set_ylim(-4, 2)
ax4.legend(loc='lower left', bbox_to_anchor=(0.40, 0.15))
plt.tight_layout()
plt.savefig('turn_manoeuvre.png', bbox_inches='tight')
plt.show()
# print("Turn manoeuvre complete")